 RFQ
RFQ技術記事
-
MEMSマイク出力インターフェース技術解析:アナログアーキテクチャからマルチチャンネルデジタル伝送まで

MEMSマイクの各種出力インターフェース紹介
現在、業界のECM(エレクトロスタティック・コンデンサ型マイク)の出力信号はほぼ全てアナログであり、シングルエンド方式が主流である。一方、MEMSマイクにはアナログとデジタルの2大カテゴリーの出力インターフェースが存在し、アナログはさらにシングルエンドと差動の2種類に分類される。デジタル部分にはPDM/I2S/TDMの3種類のデジタルインターフェースがあり、中でもPDMインターフェースが主流です。
以下にMEMSマイクの出力インターフェースカテゴリをそれぞれ紹介する:
1. アナログシングルエンド(Analog Single ended): これは比較的多い出力フォーマットであり、単価は差動(Differential)よりも若干低くなります。感度は通常-38dBV~-40dBVの範囲で、すべてのオーディオコーデックのマイク入力がこの信号をサポートしており、最も普及しているアプリケーションアーキテクチャです。ただし、このタイプのマイクのグランドループは、ノイズの発生を防ぐためにPCB設計時に特に注意が必要です。図1を参照してください。
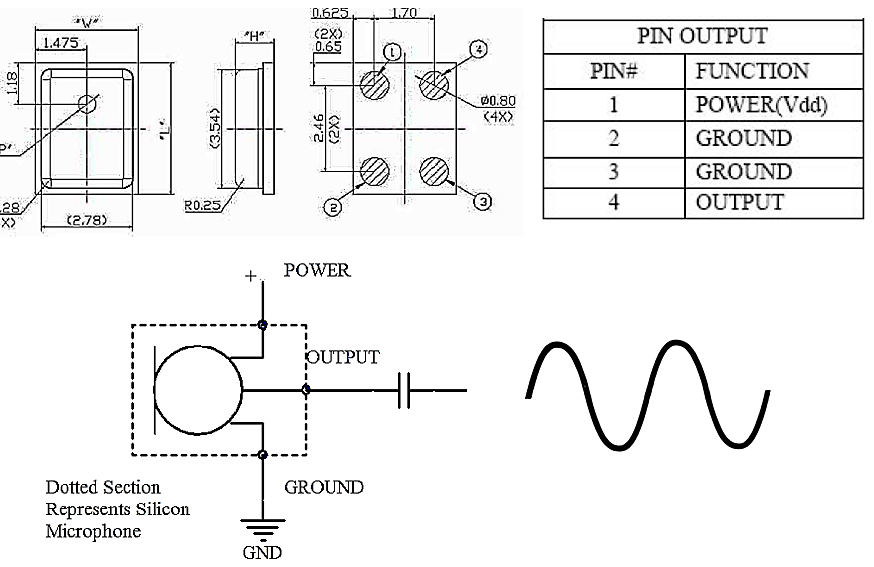
図1 アナログMEMSマイク シングルエンド
2. アナログ差動出力(Analog differential ended): 比較的少数派の出力形式であり、単価はシングルエンド(Single ended)よりやや高くなります。差動出力であるため感度は6dBV向上し、通常-32dBV前後となります。またAOP(音響過負荷点)も向上させることが可能です。ほとんどのオーディオコーデックマイク入力もこの信号をサポートしており、ノイズ低減の一般的な応用アーキテクチャである。図2を参照のこと。差動アーキテクチャはコモンモードノイズを効果的に除去できる。図2-1を参照のこと
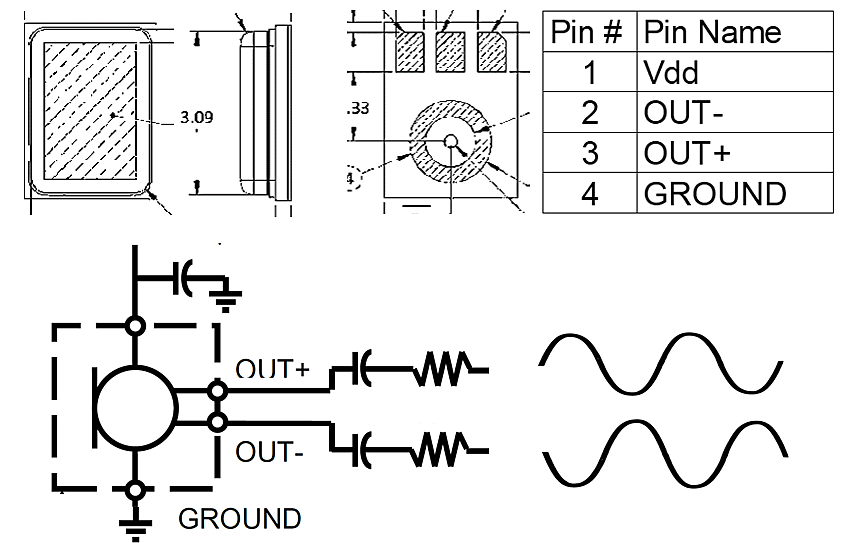
図2 アナログMEMSマイク差動終端
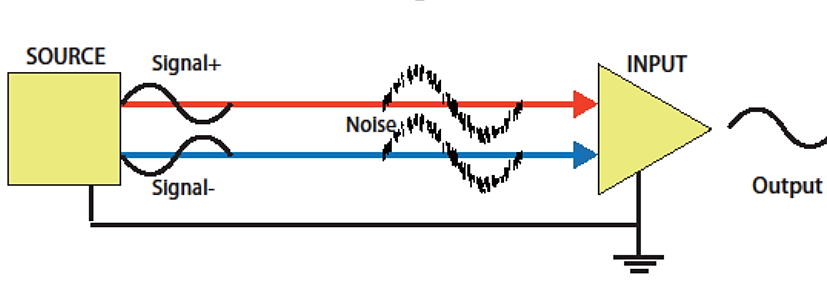
Fig.2-1 差動コモンモード
3. PDM(パルス密度変調): MEMSマイクのデジタルインターフェースにおける主流規格であり、データバスはL/Rチャンネル共用であるため、4本の配線でステレオL/R音声チャネル伝送を実現できる。これにより携帯機器のPCBレイアウト設計に有利である。デジタル方式であるためクロック信号が必要で、通常1MHz~4MHzである。これによりオーディオ帯域幅は20Hz~20kHzのアプリケーションに対応可能で、3C/自動車/IoT分野で広く採用されている。図3を参照のこと
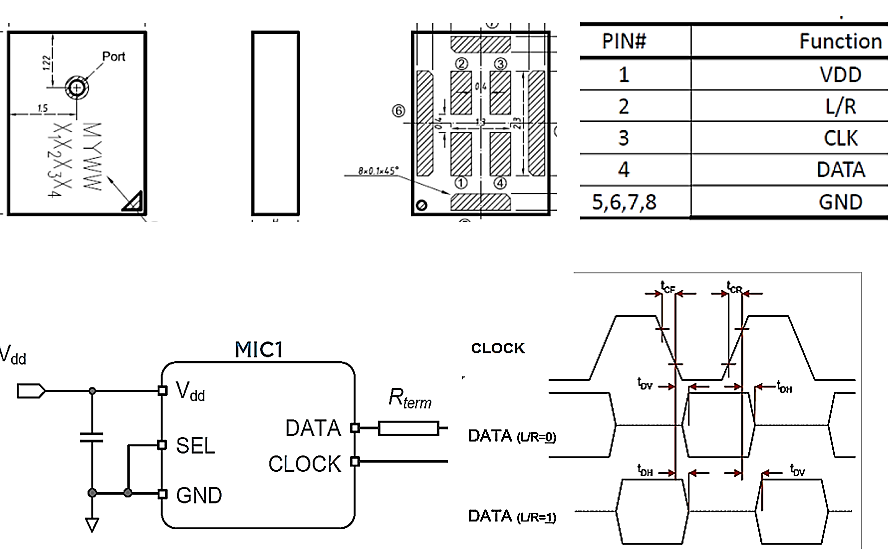
図3 デジタルMEMSマイクPDMインターフェース

4. I2S(Integrated Interchip Sound 積分回路内蔵オーディオバス):フィリップス社がデジタルオーディオ機器間の音声データ伝送のために策定したバス規格。本バスはオーディオ機器間のデータ伝送に特化しており、各種マルチメディアシステムに広く採用されている。低価格MCUの大半はPDMインターフェースをサポートせず、基本的なI2Sインターフェースのみをサポートするため、マイクメーカーは依然としてこのニッチ市場向けにI2S MEMSマイクを提供し、オーディオコーデック非搭載のアプリケーション市場に対応している。図4を参照のこと。
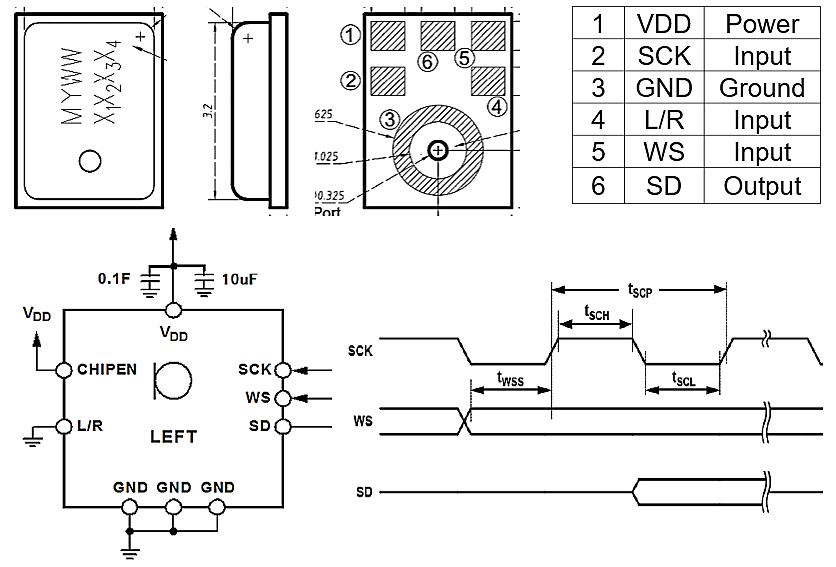
図4 デジタルMEMSマイクのI2Sインターフェース
5. TDM(時分割多重化):伝送媒体の使用時間を複数の固定タイムスロットに分割する方式。各スロットは短い時間(例:20ms)を占有し、この短い時間が仮想チャネルとなる。通信時、相互接続された双方は特定のタイムスロットに設定され、その時間枠内で伝送媒体の使用権を有する。より長い時間軸で見ると、伝送媒体全体が複数の回線が「同時に」データを伝送している状態に相当する。スマートスピーカーは遠距離音声認識(Far Field Voice Pickup)を必要とするため、2個のビームフォーミングマイクでは性能要件を満たせず、6~8個のマイクアレイ構成が開発された。各製品のマイク数が大幅に増加したため、より多くのチャンネル数を必要とするデジタルインターフェース(例: PDM / I2S)が必要となる。そこで、マイクのデジタルインターフェース数とコストを削減するため、TDM(時分割多重)方式を採用し、信号を順番に伝送することで、低コストな多チャンネル伝送を実現している。
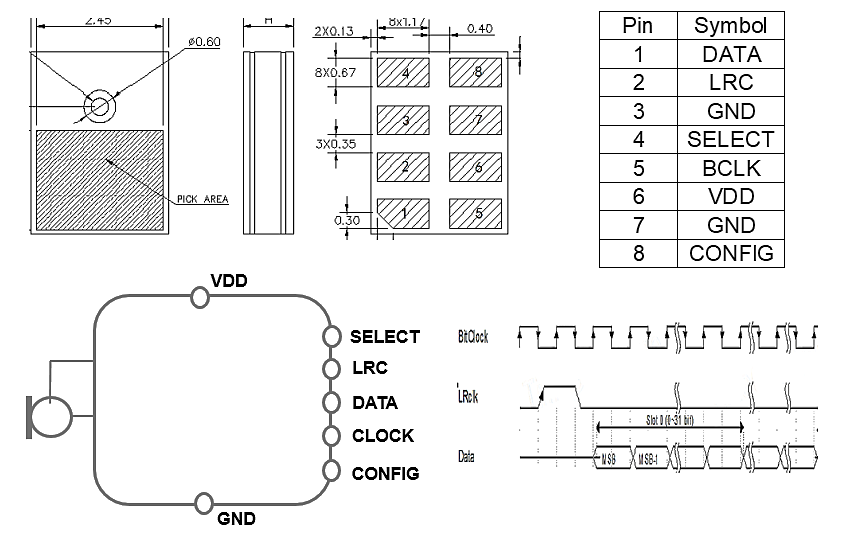
図5 デジタルMEMSマイクTDMインターフェース
6. まとめ: 以上が各種マイク出力フォーマットの紹介である。製品アプリケーションの要求に応じて適切なマイク素子仕様を選択し、高性能かつ低コストの設計基準を満たすことができる。
当サイトの一部の文章は、AI翻訳により訳されたものです。内容の正確性については、原文の中国語版をご参照いただくか、弊社までお問い合わせください。ご理解のほど、よろしくお願いいたします。